



Pozîsyonerê Zivirîna Horizontal a Sê-Eksen / Pozîsyonerê Robotê Weldingê
Parametreyên Teknîkî
| Pozîsyona Servo ya Triaxial a Turnover a Vertical | Pozîsyonerê Servo yê Triaxial ê Rotary ya Horizontal | ||||||
| Xwarinên lezok | PROJEYAN | Parametre | Parametre | TÊBÎNÎ | Parametre | Parametre | TÊBÎNÎ |
| 1 | Barkirina nirxandî | 500 kg | 1000kg | Di nav radiusa R400mm ya eksena duyemîn de | 500 kg | 1000kg | Di nav radiusa R400mm/R500mm ya eksena duyemîn de |
| 2 | Radyusa gêrasyona standard a milê | R1200mm | R1500mm | R1200mm | R1800mm | ||
| 3 | Radyusa gêrasyona standard a mîlê hember | R400mm | R500mm | R400mm | R500mm | ||
| 4 | Goşeya zivirîna eksena yekem | ±180° | ±180° | ±180° | ±180° | ||
| 5 | Goşeya zivirîna eksena duyemîn | ±360° | ±360° | ±360° | ±360° | ||
| 6 | Leza hilkişîna nominal a eksena yekem | 50°/S | 24°/Başûr | 50°/S | 24°/Başûr | ||
| 7 | Leza zivirîna nominal a eksena duyemîn | 70°/Başûr | 70°/Başûr | 70°/Başûr | 70°/Başûr | ||
| 8 | Rastbûna pozîsyonê ya dubarekirî | ±0.10mm | ±0.20mm | ±0.10mm | ±0.20mm | ||
| 9 | Pîvana sînorî ya çarçoveya cihguherînê (dirêjahî × firehî × bilindahî) | 2200mm×800mm ×90mm | 3200mm×1000mm ×110mm | 2200mm×800mm ×90mm | 3200mm×1000mm ×110mm | ||
| 10 | Pîvana giştî ya guhezkarê pozîsyonê (dirêjahî × firehî × bilindahî) | 4000mm×700mm ×1650mm | 5200mm×1000mm ×1850mm | 4000mm×700mm ×1650mm | 4500mm×3600mm ×1750mm | ||
| 11 | Bilindahiya navendê ya zivirîna eksena yekem | 1350mm | 1500mm | 800mm | 1000mm | ||
| 12 | Mercên dabînkirina hêzê | Sê-qonax 200V ± 10% 50HZ | Sê-qonax 200V ± 10% 50HZ | Sê-qonax 200V ± 10% 50HZ | Sê-qonax 200V ± 10% 50HZ | Bi transformatora îzolekirinê | |
| 13 | Pola îzolekirinê | H | H | H | H | ||
| 14 | Giraniya net a alavan | Nêzîkî 1800 kg | Nêzîkî 3000 kg | Nêzîkî 2000 kg | Nêzîkî 2000 kg | ||
Pozîsyonerê Servo yê Triaxial ê Rotary ya Horizontal

Pozîsyona Servo ya Triaxial a Turnover a Vertical
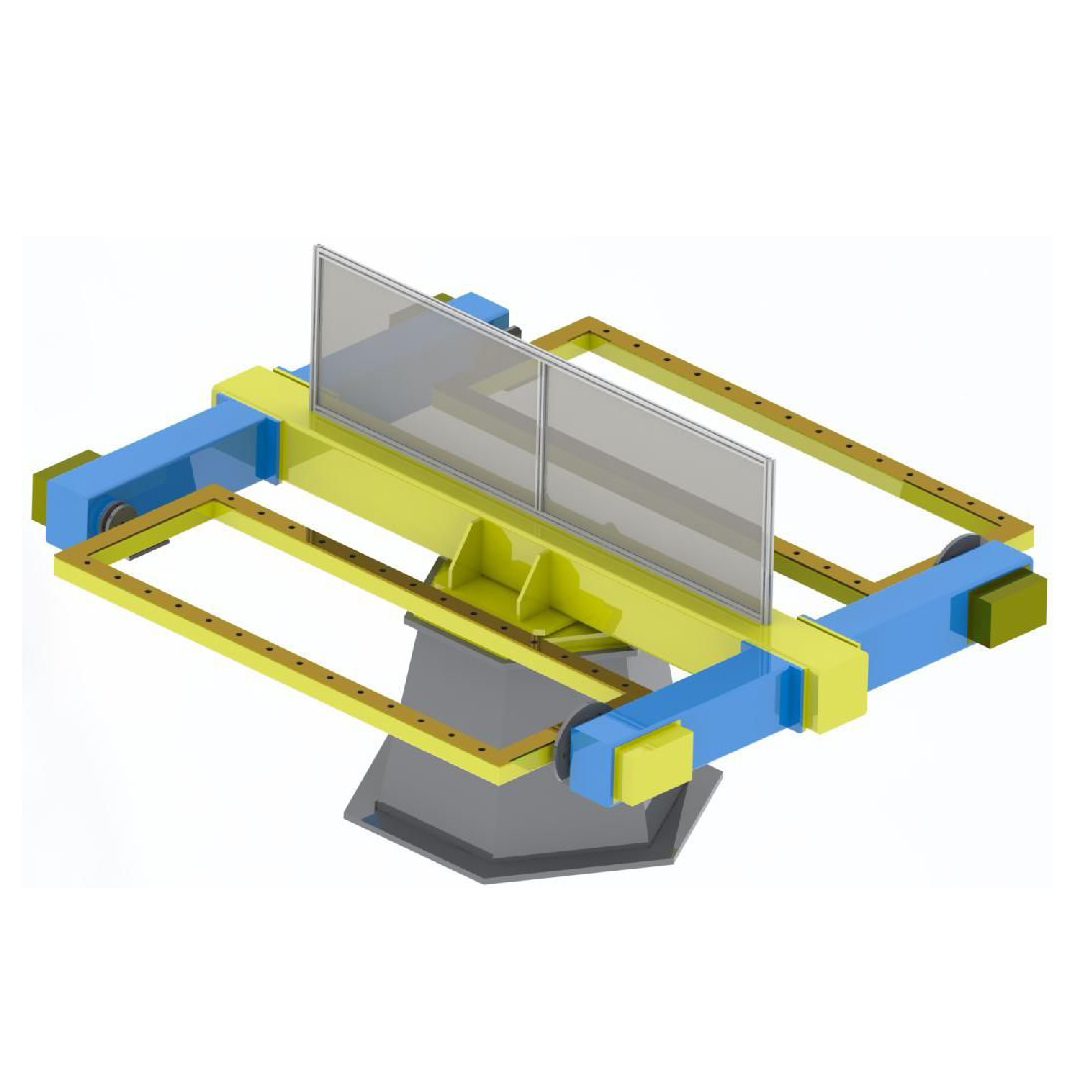
Pêşgotina Avahiyê
Pozîsyonera servo ya zivirîna vertîkal a sêalî bi piranî ji çarçoveya entegre ya weldkirî, çarçoveya cîhguherîna zivirînê, motora servo ya AC û kêmkera rastbûna RV, piştgiriya rotary, mekanîzmaya rêber, mertala parastinê û pergala kontrola elektrîkê pêk tê.
Çarçoveya yekpare ya ku hatiye lêkirin bi profîlên bi kalîte bilind hatiye lêkirin. Piştî germkirin û rakirina stresê, divê ji hêla makîneya profesyonel ve were pêvajokirin da ku rastbûna makîneyê ya bilind û rastbûna pozîsyonên mifteyê were misoger kirin. Rû bi boyaxa dij-zingarê tê boyaxkirin, ku xweşik û fireh e, û reng dikare li gorî hewcedariyên xerîdar were xweş kirin.
Divê çarçoveya jihevqetandina zivirînê bi pola profîla kalîteya bilind were qelandin û bi makîneya profesyonel were pêvajo kirin. Divê rûyê wê bi kunên standard ên bi têlan ji bo amûrên bicihkirinê yên montajê were makînekirin, û divê boyaxkirin û reşbûn û dermankirina pêşîlêgirtina zengarê were kirin.
Motora servo ya AC bi kêmkerê RV wekî mekanîzmaya hêzê tê hilbijartin, ku dikare aramiya zivirînê, rastbûna pozîsyonê û
Berxwedaneke dirêj û rêjeya têkçûnê ya kêm. Mekanîzmaya rêber ji sifir hatiye çêkirin, ku bandorek rêberiya baş heye. Bingeha rêber îzolasyona yekgirtî bikar tîne, ku dikare bi bandor motora servo, robot û çavkaniya hêza weldingê biparêze.
Sîstema kontrola elektrîkê ji bo kontrolkirina pozîsyonerê PLC-ya Omron a Japonî bikar tîne, bi performansa stabîl û rêjeya têkçûna kêm. Parçeyên elektrîkê ji markayên navdar ên li hundur û derveyî welat têne hilbijartin da ku kalîte û aramiya karanînê were misoger kirin.
Mertala astengkirina ronahiyê bi profîla aluminium û plakaya plastîk a aluminiumê ve hatî çêkirin da ku li dijî ronahiya kevanê ya di dema kaynakirin û birînê de çêdibe biparêze.








