Robota Hevkariyê ya Nerm a Seriya ER
Parametreyên Teknîkî
| ER3 | ER7 | ER3 Pro | ER7 Pro | |||||
| Taybetmendî | ||||||||
| Dawetkirin | 3 kg | 7 kg | 3 kg | 7 kg | ||||
| Radyusa xebatê | 760mm | 850mm | 760mm | 850mm | ||||
| Giraniya mirî | Nêzîkî 21 kg | Nêzîkî 27 kg | Nêzîkî 22 kg | Nêzîkî 29 kg | ||||
| Asta Azadiyê | 6 gewrên zivirî | 6 gewrên zivirî | 7 gewreyên zivirî | 7 gewreyên zivirî | ||||
| MTBF | >35000h | >35000h | >35000h | >35000h | ||||
| Navê min | DC 48V | DC 48V | DC 48V | DC 48V | ||||
| Bernamekirin | Fêrkirina kaşkirinê û navrûya grafîkî | Fêrkirina kaşkirinê û navrûya grafîkî | Fêrkirina kaşkirinê û navrûya grafîkî | Fêrkirina kaşkirinê û navrûya grafîkî | ||||
| Birêvebirinî | ||||||||
| ERK | Navoser | Nirxa herî bilind | Navoser | Nirxa herî bilind | Navoser | Nirxa herî bilind | Navoser | Serî |
| XERC | 200w | 400w | 500w | 900w | 300w | 500w | 600w | 1000w |
| Ewlekarî | > 22 Fonksiyonên Ewlehiyê yên Verastbar | > 22 Fonksiyonên Ewlehiyê yên Verastbar | > 22 Fonksiyonên Ewlehiyê yên Verastbar | > 22 Fonksiyonên Ewlehiyê yên Verastbar | ||||
| Şehadet | Li gorî standarda "EN ISO 13849-1, Cat. 3, PL d, Sertîfîkaya CE ya YE" be. | Li gorî standarda "EN ISO 13849-1, Cat. 3, PL d, Sertîfîkaya CE ya YE" be. | Li gorî standarda "EN ISO 13849-1, Cat. 3, PL d, Sertîfîkaya CE ya YE" be. | Li gorî standarda "EN ISO 13849-1, Cat. 3, PL d, Sertîfîkaya CE ya YE" be. | ||||
| Hestkirina hêzê, flanşa amûrê | hêz, XyZ | Momenta hêzê, XyZ | Hêz, xyZ | Momenta hêzê, XyZ | Hêz, xyZ | Momenta hêzê, XyZ | Hêz, xyZ | Momenta hêzê, xyz |
| Rêjeya çareseriyê ya pîvandina hêzê | 0.1N | 0.02Nm | 0.1N | 0.02Nm | 0.1N | 0.02Nm | 0.1N | 0.02Nm |
| Rastbûna nisbî ya kontrola hêzê | 0.5N | 0.1Nm | 0.5N | 0.1Nm | 0.5N | 0.1Nm | 0.5N | 0.1Nm |
| Rêzeya verastkirî ya hişkbûna Kartezyen | 0~3000N/m, 0~300Nm/radyûm | 0~3000N/m, 0~300Nm/radyûm | 0~3000N/m, 0~300Nm/radyûm | 0~3000N/m, 0~300Nm/radyûm | ||||
| Rêzeya germahiya xebitandinê | 0~40° ℃ | 0~40° ℃ | 0~40° ℃ | 0~40 ℃ | ||||
| Şilî | 20-80%RH (bê kondensasyon) | 20-80%RH (bê kondensasyon) | 20-80%RH (bê kondensasyon) | 20-80%RH (bê kondensasyon) | ||||
| 180°/s | ||||||||
| 180°/s | ±0.03 mm | ±0.03 mm | ±0.03 mm | ±0.03 mm | ||||
| 180°/s | Çarçoveya kar | Leza herî zêde | Çarçoveya kar | Leza herî zêde | Çarçoveya kar | Leza herî zêde | Çarçoveya kar | Leza herî zêde |
| 180°/s | ±170° | 180°/s | ±170° |
| ±170° | 180°/s | ±170° | 110°/s |
| Axîn 2 | ±120° | 180°/s | ±120° |
| ±120° | 180°/s | ±120° | 110°/s |
| Axîn 3 | ±120° | 180°/s | ±120° | 180°/s | ±170° | 180°/s | ±170° | 180°/s |
| Axîn 4 | ±170° | 180°/s | ±170° | 180°/s | ±120° | 180°/s | ±120° | 180°/s |
| Axîn 5 | ±120° | 180°/s | ±120° | 180°/s | ±170° | 180°/s | ±170° | 180°/s |
| Axeya 6 | ±360° | 180°/s | ±360° | 180°/s | ±120° | 180°/s | ±120° | 180°/s |
| Axîn 7 | ------ | ------ | ------ | ------ | ±360° | 180°/s | ±360° | 180°/s |
| Leza herî zêde li dawiya amûrê | ≤3m/s | ≤2.5m/s | ≤3m/s | ≤2.5m/s | ||||
| Taybetmendî | ||||||||
| Asta Parastina IP-yê | IP54 | IP54 | IP54 | IP54 | ||||
| Pola Odeya Paqij a ISO | 5 | 6 | 5 | 6 | ||||
| Deng | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ||||
| Siwarkirina robotan | Bi fermî hatiye siwarkirin, bi berevajî hatiye siwarkirin, bi aliyî hatiye siwarkirin | Bi fermî hatiye siwarkirin, bi berevajî hatiye siwarkirin, bi aliyî hatiye siwarkirin | Bi fermî hatiye siwarkirin, bi berevajî hatiye siwarkirin, bi aliyî hatiye siwarkirin | Bi fermî hatiye siwarkirin, bi berevajî hatiye siwarkirin, bi aliyî hatiye siwarkirin | ||||
| Porta I/O ya Armanca Giştî | Têketina Dîjîtal 4 | Têketina Dîjîtal 4 | Têketina Dîjîtal 4 | Têketina Dîjîtal 4 | ||||
|
| Derketina Dîjîtal 4 | Derketina Dîjîtal 4 | Derketina Dîjîtal 4 | Derketina Dîjîtal 4 | ||||
| Porta I/O ya Ewlehiyê | Rawestgeha awarte ya derveyî 2 | Rawestgeha awarte ya derveyî 2 | Rawestgeha awarte ya derveyî 2 | Rawestgeha awarte ya derveyî 2 | ||||
|
| Deriyê ewlehiyê yê derve 2 | Deriyê ewlehiyê yê derve 2 | Deriyê ewlehiyê yê derve 2 | Deriyê ewlehiyê yê derve 2 | ||||
| Cureyê Girêdana Amûrê | M8 | M8 | M8 | M8 | ||||
| Dabînkirina Hêzê ya I/O ya Amûrê | 24V/1A | 24V/1A | 24V/1A | 24V/1A | ||||
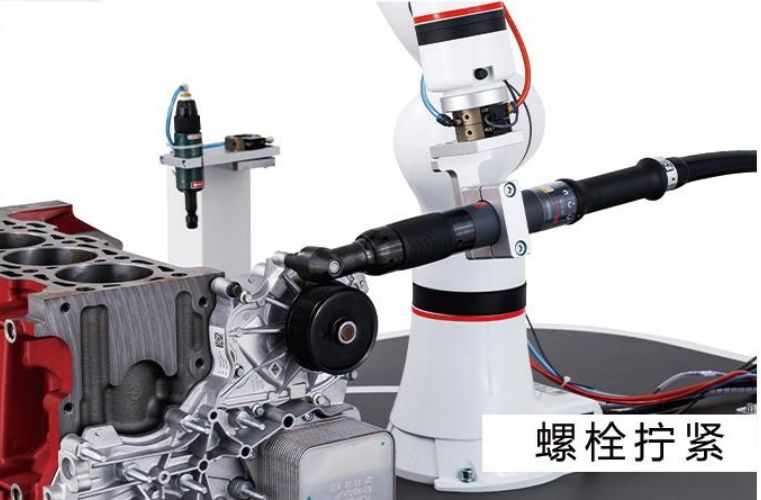
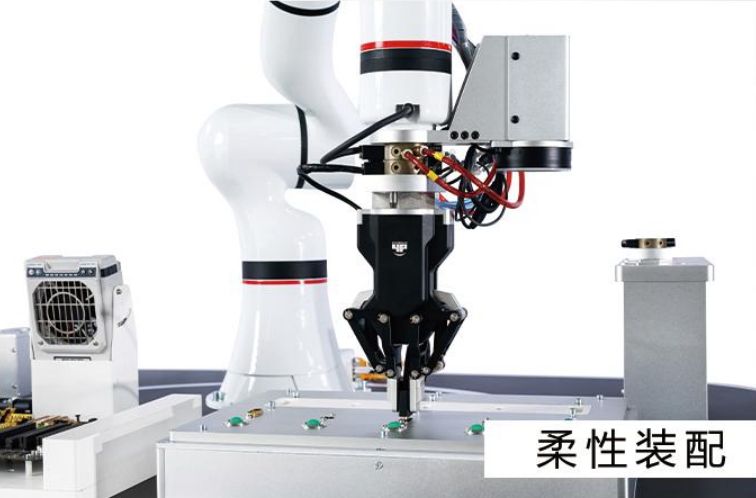
Serlêdanên pîşesaziyê
Robotên Hevkariyê yên Nerm ên XMate ji bo cûrbecûr sepanên pêvajoyê guncan in, di nav de civandina nerm, kilîtkirina pêçan, vekolîn û pîvandin, veguhastin, rakirina pêça zeliqê li ser materyalan, lênêrîna alavan, û hwd.. Ew dikare alîkariya pargîdaniyên hemî mezinahî bike ku hilberînê baştir bikin û otomasyona nerm bi dest bixin.